Simple Hexapod Robot Control
Main Contents
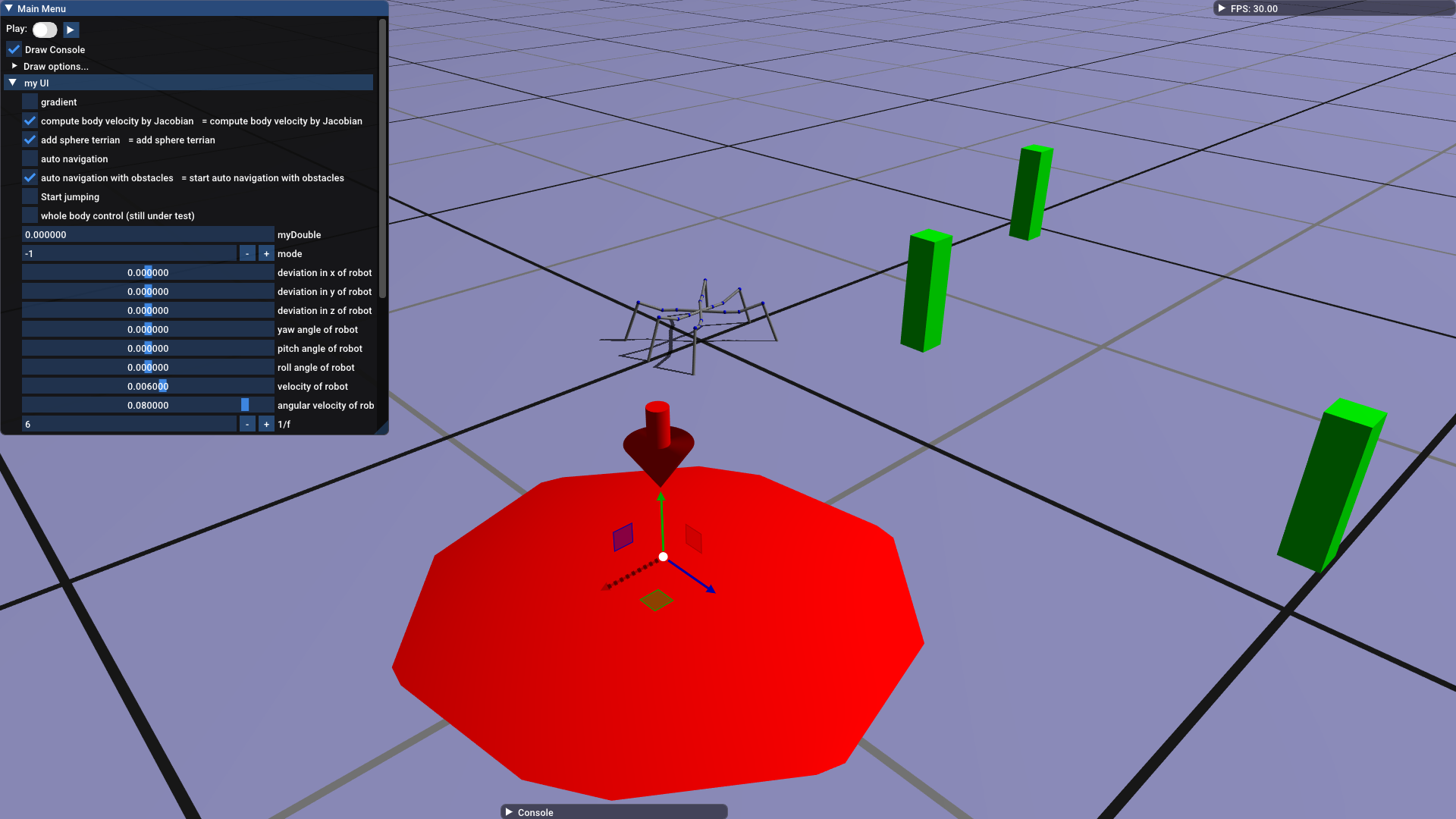
We developed a locomotion control framework for Hexapod in simulation using C++.Basic Goal:
- Inverse kinematics solver
- Multiple Gaits and Transitions
- Basic Navigation and Obstacle Avoidance
- Complicated Terrain Test
- Whole Body Control