Gradual Transition From Model-Based to Model-Free Actor-Critic Reinforcement Learning
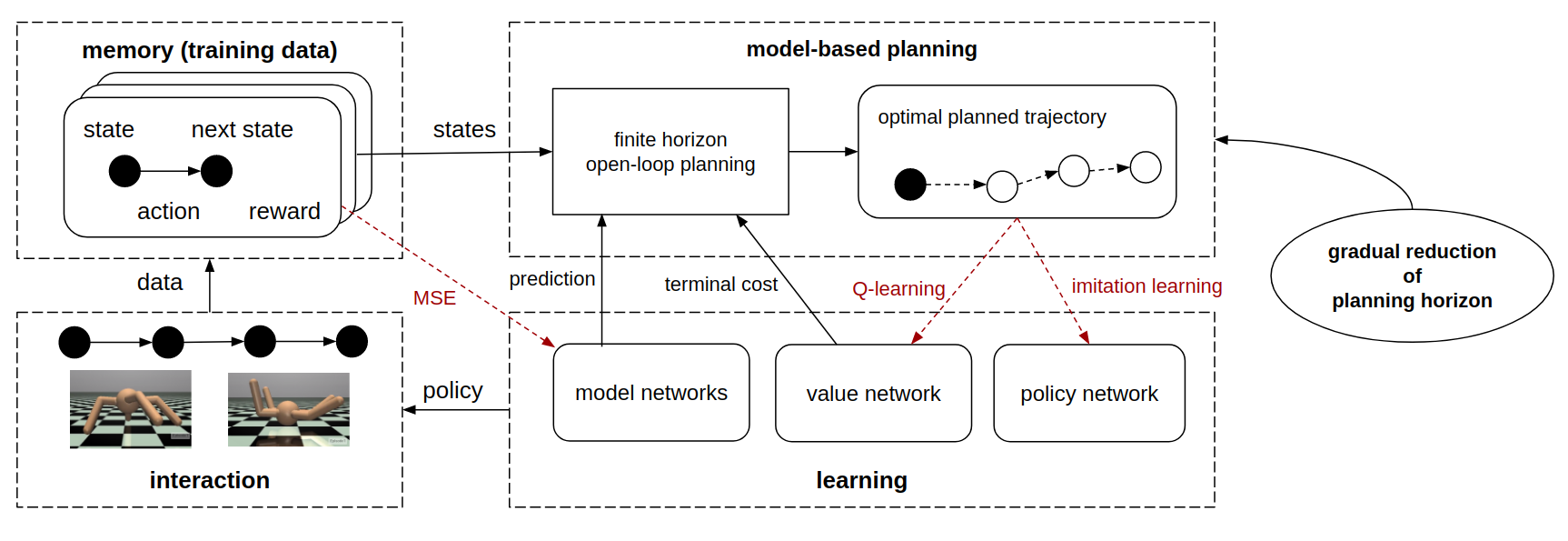
Framework of the second training stage of our method. The interaction data is recorded in a replay buffer, that learn
the dynamics model and reward model. The data pairs are also extended to longer trajectories using model-based prediction
and planning, which can guide policy learning and value learning. The updated policy is again utilized for generating
new interaction data. The planning horizon is gradually reduced during training.
Abstract
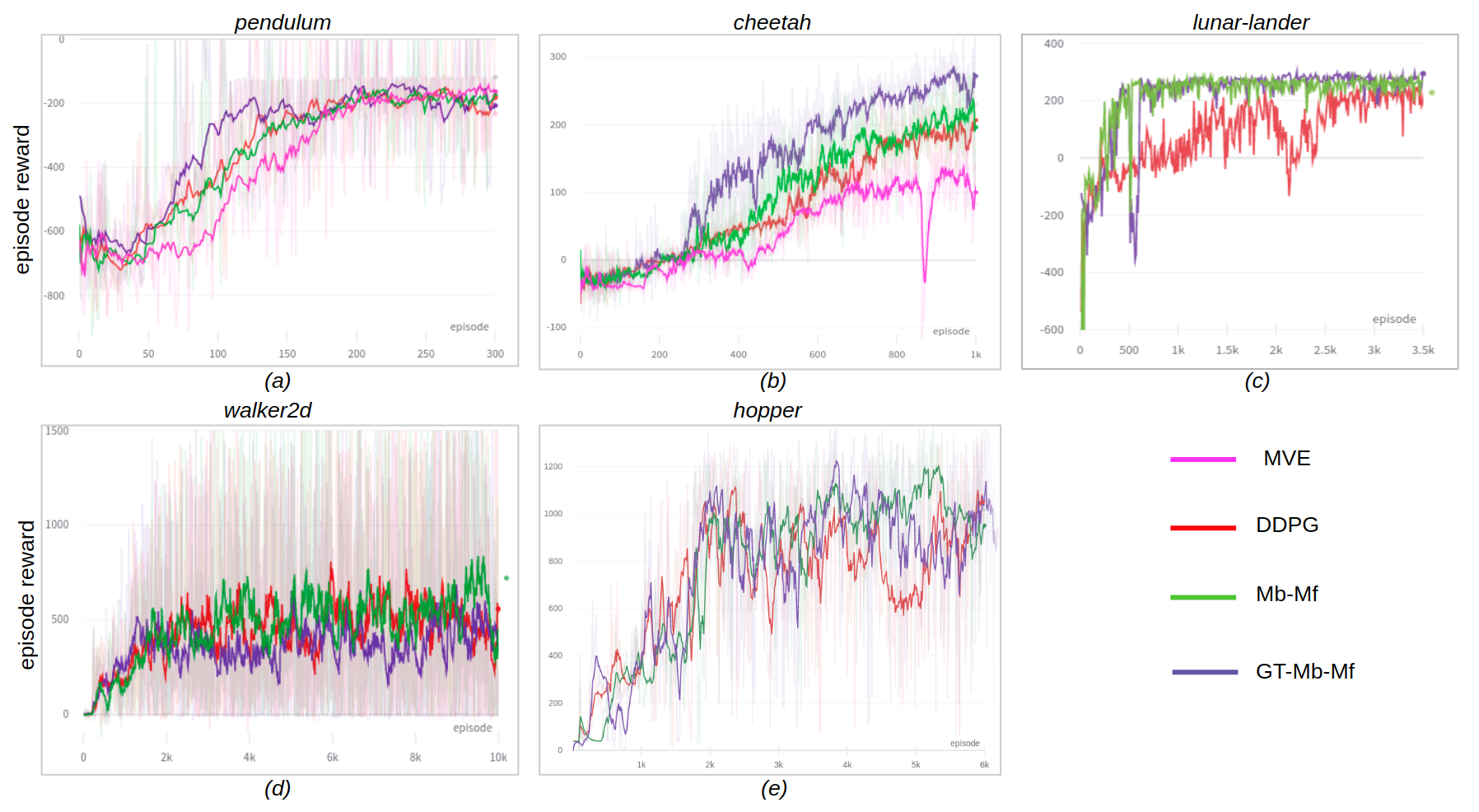
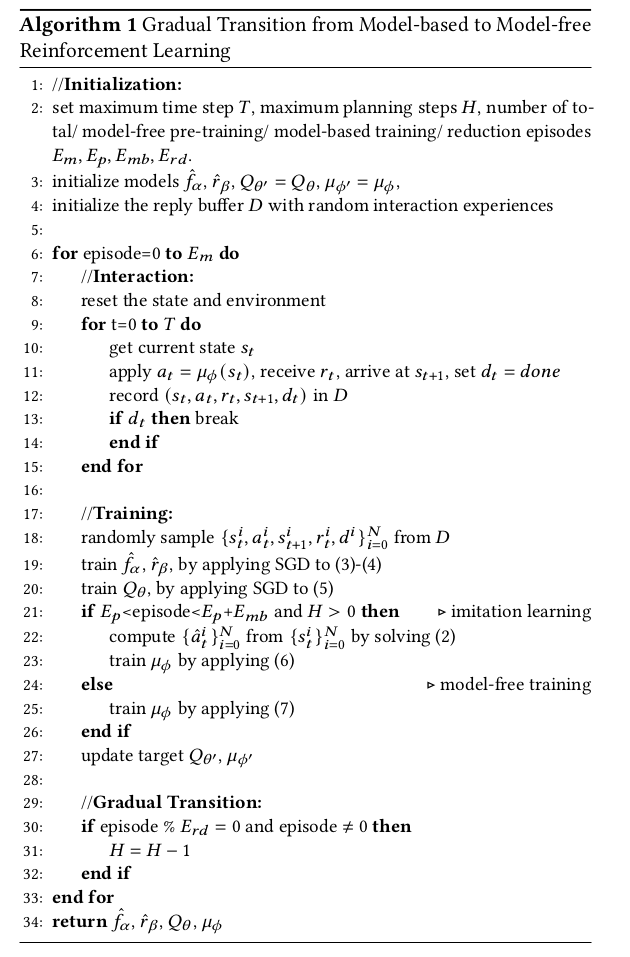
Model-free reinforcement learning methods could achieve very good performance but typically requires a substantial amount of data collection for convergence. On the other hand, model-based methods tend to be more sample efficient but suffer from the bias of the learned models. In this work, we aim to combine the advantages of these approaches. We design a model-based learning framework that is integrated with value learning. By gradually reducing the planning horizon, it transforms into pure model-free actor-critic learning as the training goes. The experiments show that, for environments with relatively stable dynamics and lower dimensions for action space, our proposed method reaches high performance faster compared with baselines. The code is publicly available.Paper: [PDF] Code: [GitHub]
Algorithm
Experiment Results